Recherche
Le laboratoire REPER 3D innove et permet la réalisation de projets de recherche diversifiés, notamment dans un contexte s’apparentant aux conditions du monde réel tout en préservant le contrôle des environnements.
Projets de recherche

Modélisation tridimensionnelle par imagerie aérienne drone à faible coût en contexte urbain
Intégration de capteurs sur des plateformes de cartographie mobile à partir des nuages de points

Conception et développement d’une plateforme drone hydrographique de surface versatile à faible coûts pour des levés en zones côtières


Le LabEx REPER 3D pour de nouvelles activités d’apprentissage en photogrammétrie et traitement d’images

Hydro-Access: Promoting hydrography among communities with accessible hydrography training resources

Équipements
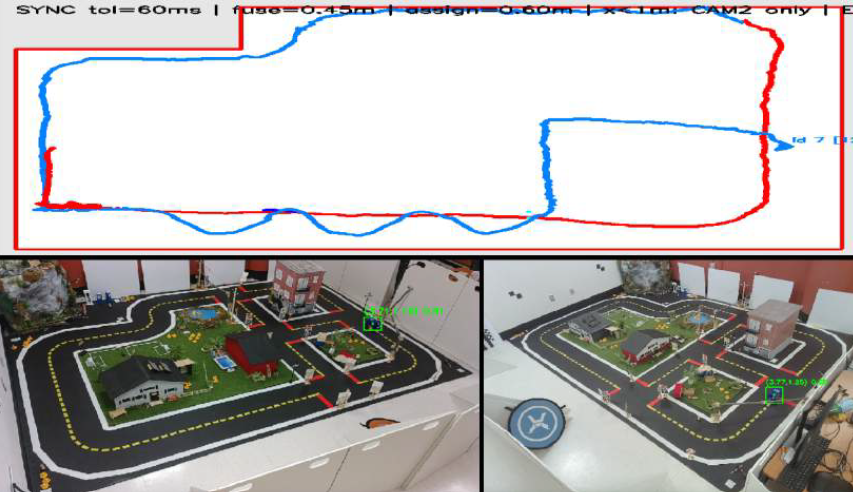
Environnement urbain miniaturisé. L’infrastructure Duckietown joue un rôle central dans le laboratoire REPER 3D afin de recréer un environnement urbain miniaturisé dont les paramètres d’acquisition des données spatiales peuvent être contrôlés. En plus de cet environnement, cinq bots autonomes, disposant d’une caméra fisheye, d’un pointeur laser, d’un capteur de mouvement (i.e. IMU) et d’un ordinateur Jetson nano embarqué, permettent de disposer de système d’acquisition de données mobile aux systèmes de cartographie mobile. Au sein du REPER 3D, l’environnement urbain miniaturisé (i.e. la maquette) a été géoréférencée, permettant d’élargir ses applications à des problématiques d’analyse spatiale, de photogrammétrie aéroportée ou terrestre, de délimitation foncière, pour n’en citer que quelques-unes.

Le Duckiebot est une plateforme entièrement autonome (la plateforme est totalement décentralisée). Il possède une caméra frontale, les actionneurs comprennent deux moteurs à courant continu, ainsi que des LED RVB adressables pour signaler aux autres Duckiebots et éclairer la route. Toutes les décisions sont prises à bord, grâce à la puissance des cartes Raspberry Pi et NVIDIA Jetson Nano - des ordinateurs de la taille d'une carte de crédit. La batterie embarquée offre des heures d'autonomie et, dans les modèles les plus récents, des diagnostics avancés. Il permet ainsi d'étudier des comportements complexes, de se familiariser avec les défis du monde réel et de faire de la recherche.

Drone aérien équipé d’une caméra RGB. Le DJI Mavic 3E est équipé d’un récepteur GNSS qui reçoit des corrections RTK en temps réel permet d’effectuer l’acquisition des données photogrammétriques par imagerie drone à une incertitude inférieure à 5 cm.

Drone aérien équipé des caméras permettant l’acquisition des données RGB (20MPixels) et G/R/RE/NIR (5MPixels). Le DJI Mavic 3M est équipé d’un récepteur GNSS qui reçoit des corrections RTK en temps réel permet d’effectuer l’acquisition des données photogrammétriques par imagerie drone à une incertitude inférieure à 5 cm.

Drone aérien équipé d’une caméra RGB (20MPixels). L’Autel EVO II est un drone d’entrée de gamme qui permet d’effectuer l’acquisition des données photogrammétriques par imagerie aérienne.

Drone aérien équipé d’une caméra RGB. Le DJI Phantom IV est équipé d’un récepteur GNSS qui reçoit des corrections RTK en temps réel qui permet d’effectuer l’acquisition des données photogrammétriques par imagerie aérienne.

Drone aérien équipé d’une caméra RGB (48MPixels). Le DJI mini 3 pro est un drone d’entrée de gamme utilisé au laboratoire pour la cartographie de l’infrastructure DuckieTown ou pour l’acquisition des images visant le complément d’informations pour les projets de photogrammétrie aérienne ou encore la valorisation de la recherche.

Drone aérien équipé d’une caméra RGB (12MPixels). Le DJI mini 2 est un drone d’entrée de gamme utilisé au laboratoire pour la cartographie de l’infrastructure DuckieTown ou pour l’acquisition des images visant le complément d’informations pour les projets de photogrammétrie aérienne ou encore la valorisation de la recherche.

Drone hydrographique de surface. L'Océan REPER v2 est un drone hydrographique a été conçu et développé au sein du laboratoire REPER 3D à faible coût. Il a été conçu en partenariat avec Groupe Océan, Mitacs, Service Hydrographique du Canada et Pêches et Océans Canada. Il est équipé avec un système de navigation et d’autopilotage ainsi que d’une sonde mono faisceau permettant l’acquisition des données hydrospatiales dans différents environnements (e.g. lacs, rivières).

LiDAR statique terrestre. Le FARO X130 est un scanneur LiDAR statique 3D utilisé dans l’acquisition des nuages de points de haute précision et de haute résolution dans les différents environnements (i.e. intérieur, extérieur, côtier, urbain).
