Détection et cartographie en temps réel par réseau de caméras
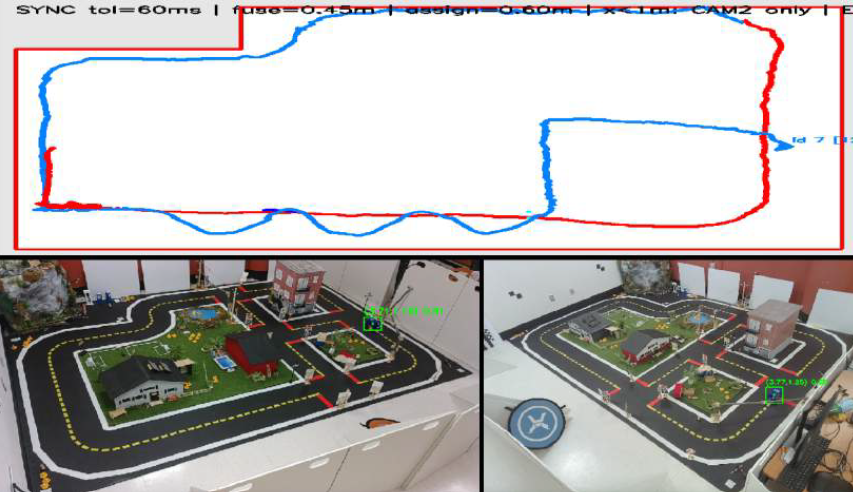
Le projet porte sur le développement d’un système de détection d’objets et de cartographie 3D en temps réel, s’inscrivant dans le cadre des travaux du laboratoire REPER 3D. Il vise à exploiter un réseau de caméras autonomes, du type OAK D Pro, afin de suivre et localiser un robot mobile dans un environnement donné. Après une phase de calibration manuelle, le système est capable d’estimer en continu la position du robot et de produire une représentation tridimensionnelle dynamique de la zone observée.
Ce travail constitue une composante d’un projet plus large dédié à la conception de systèmes de détection et géoréférencement des plateformes mobiles. La solution développée est fonctionnelle, autonome et relativement robuste, bien qu’elle ne soit pas encore interconnectée avec la plateforme mobile au sol pour l’échange de données en temps réel.
À terme, l’intégration de modules de reconnaissance avancée permettrait d’identifier des objets spécifiques, tels que des véhicules, ainsi que des évolutions du terrain. Couplé à des données issues de capteurs LiDAR et à une cartographie préexistante, le système pourrait assurer le géoréférencement précis et le suivi simultané de plusieurs cibles.
Actuellement, les axes de développement suivants sont envisagés dans le prolongement de ces travaux :
- L’amélioration des algorithmes de détection et de suivi d’objets ;
- L’objectif est d’accroître la robustesse du système face aux variations environnementales et d’élargir les capacités de reconnaissance à des cibles multiples et hétérogènes ;
- L’intégration et la fusion de données issues de capteurs complémentaires, notamment LiDAR.


